Mü0te doch über den Luftdruck in der Airbox gehen, oder?
Gibts nen Bericht über den Spritzen Umbau?
Das endlose GSX-R "SRAD" 750 Projekt - Replica mit DBW ?
Der Bereich für Eure Projekte, Um- und Aufbauten. Auch Tips und Tricks zu Feinheiten, aber keine Standardthemen wie: so wechselte ich die Bremsbeläge.
-

- Klaus69 Offline
- Beiträge: 1060
- Registriert: Montag 20. Juni 2005, 10:00
- Motorrad: ZXR750
- Lieblingsstrecke: OSL, Cartagena
- Wohnort: nähe Schlüchtern
Re: SRAD 750 Projekt
Kontaktdaten:
-

- Chef_Koch Offline
- Beiträge: 676
- Registriert: Montag 14. November 2011, 22:35
- Motorrad: SRAD 750, was sonst?
- Lieblingsstrecke: Schleiz
- Wohnort: Stuttgart
Re: SRAD 750 Projekt
Kontaktdaten:
Welche MS haste denn verbaut?IchMagKekse hat geschrieben:Moin, wie hast du bei dir denn die Ramairkorrektur reingebracht?
Ich hab ne Zx7r gesquirtet und das is aktuell meine größte Sorge. Zu Ramair findet sich leider erstaunlich wenig im MS-Bereich, und ich kann mir nich vorstellen, dass es da mit ner proportionalen Korrektur getan ist.
Also beim letzten mal hatte ich das über den MAP-Sensor mitlaufen lassen.
In den Data-Logs hatte ich immer schön gesehen, dass dann der MAP-Wert über Umgebungsluftdruck ansteigt.
Muss man halt nur noch die richtige Lasterfassung im entsprechenden Bereich aktiv haben.
Baro-Sensor war dann natürlich außerhalb der Airbox in einem geschützten Bereich angebracht.
Nur hat man dann aber eben den vorgegebenen Einfluss. (z.B. 1/3 bei Hybrid Mode).
Und das MAP-Sampling spielt auch noch mit rein, könnte man aber, falls man es benutzt schnell auf dem Prüfstand in den richtigen Kurbelwinkelbereich legen (Geht ja Drehzahlabhängig)
Man könnte natürlich auch mal versuchen den Baro-Sensor in die Airbox zu legen. Dann hättest du die komplett frei einstellbare Kurve zur Korrektur.
Aber das ganze müsste man halt mal auf einem Prüfstand mit verstellbarer Anblasung testen/abstimmen.
Sowas habe ich leider bei mir in der Nähe nicht, von daher ist das Mist.
-
- IchMagKekse Offline
- Beiträge: 17
- Registriert: Mittwoch 24. Juni 2015, 21:13
Re: SRAD 750 Projekt
Kontaktdaten:
Ich verwende ne Ms2 mit Extra-Software und nutze ITB. Da ist ausschließlich entweder Map oder Tps aktiv, abhängig von der Last (1 kombinierter VE-Table). Du nutzt dann einen AN-Hybrid? Will jetzt nicht so viel hier in deinen Thread reinlabern da's ja um dein Moped geht. Dachte nur falls du da schon verwertbare Daten gehabt hättest wäre es ne WinWin Situation gewesen.
Der Map wird bei mir maximal Umgebungsdruck und ist bis auf die Nachkommastelle unabhängig vom Staudruck, trotz dem extrem effektiven System der Zx7r. Map eignet sich nach meinen Daten daher nicht für Staudruckkorrektur, sobald etwas mehr Last anliegt. Beispiellog zeigt Durchladen von 4. zu 6. Gang, rot der Map-Wert. Drehzahl, Gang und Geschwindigkeit haben darauf keinen Einfluss in diesem Bereich. Der Afr sinkt aber gemittelt um 3% im Vergleich 5./6. Gang bei gleichen sonstigen Bedingungen.
Ich hab jetzt auch ein Barometer in der Airbox, um dauerhaufte BaroCorr zu haben auf Basis des Airboxinnendrucks. Hauptsächlich um den Schaltpunkt des ITB (Wechsel AN/SD) ordentlich auf 90% Baro/Airboxdruck zu halten. Evt fette ich bei Baro>100kpa dann minimal an, aber dafür fehlen mir noch Daten um ein Modell zu erstellen... das Zweite Baro will noch nicht so richtig mit der Ms. Müsste man sich prinzipiell einfach ableiten können aus den Afr-Abweichungen abhängig der Geschwindigkeit.
Wenn man sich Logs anschaut, dann korreliert der Ramaireffekt auch schön mit den Effekten der Mat/Clt-Tabelle, die Last/Drehzahlabhängig Mat und Clt koppelt (Clt fällt ab bei hoher Geschwindigkeit/Drehzahl). Zumindest bei der Ms2E-Fw verwendet die Tabelle bisher kaum einer und standardmäßig is die auch genullt. Scheint auch noch recht neu, von der Idee her imo aber wahrscheinlich durchaus sinnvoll. Nur dafür vernünftige Werte messen dürfte nicht so einfach sein.
Der Map wird bei mir maximal Umgebungsdruck und ist bis auf die Nachkommastelle unabhängig vom Staudruck, trotz dem extrem effektiven System der Zx7r. Map eignet sich nach meinen Daten daher nicht für Staudruckkorrektur, sobald etwas mehr Last anliegt. Beispiellog zeigt Durchladen von 4. zu 6. Gang, rot der Map-Wert. Drehzahl, Gang und Geschwindigkeit haben darauf keinen Einfluss in diesem Bereich. Der Afr sinkt aber gemittelt um 3% im Vergleich 5./6. Gang bei gleichen sonstigen Bedingungen.
- ramairMap.png (11.1 KiB) 3028 mal betrachtet
Wenn man sich Logs anschaut, dann korreliert der Ramaireffekt auch schön mit den Effekten der Mat/Clt-Tabelle, die Last/Drehzahlabhängig Mat und Clt koppelt (Clt fällt ab bei hoher Geschwindigkeit/Drehzahl). Zumindest bei der Ms2E-Fw verwendet die Tabelle bisher kaum einer und standardmäßig is die auch genullt. Scheint auch noch recht neu, von der Idee her imo aber wahrscheinlich durchaus sinnvoll. Nur dafür vernünftige Werte messen dürfte nicht so einfach sein.
-
- Chef_Koch Offline
- Beiträge: 676
- Registriert: Montag 14. November 2011, 22:35
- Motorrad: SRAD 750, was sonst?
- Lieblingsstrecke: Schleiz
- Wohnort: Stuttgart
Re: SRAD 750 Projekt
Kontaktdaten:
Also ITB habe ich noch nicht getestet. Dafür hatte ich einfach noch keine Zeit. Generell hatte ich bisher leider viel zu wenig Zeit zum Abstimmen.
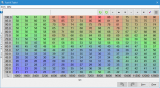
Ich benutze aktuell alle 4 VE-Tables um so das größtmögliche Kennfeld bzw. die feinste Abstufung zu bekommen.
Und zwar einmal RPM-Switch von VE 1 auf 3
Dann Table Blend von VE2 auf VE 4 via TPS als harten Übergang.
Hier mal ein Bild wie dann das ganze aussieht.
Bitte auf die Werte nichts geben. Das war jetzt nur so ein Uralt-Table von meinem Computer. Das aktuelle Zeug liegt immer auf meinem Laptop.
(Bild gibts in Vollauflösung beim Draufklicken)
Macht natürlich so viel mehr Arbeit zum Abstimmen als nur mit einem oder zwei Tables. Aber ich denke es kommt der Fahrbarkeit zu Gute. Da sich der VE-Wert zwischen manchen Stützpunkten eben doch nicht linear verhält.
Man muss nur für AutoTune und dem VE-Analyser immer entsprechende Drehzahl und Last Filter setzen. Denn anscheinend ist der nicht wirklich für alle 4 Tables ausgelegt. Kenne auch bisher niemanden der so wie ich alle 4 Tables quasi gleichzeitig nutzt. Auf alle Fälle pfuscht dann der AutoTune ohne Filter irgendwie im falschen Table rum.
Also muss man im AutoTune für jedes Table den passenden Filter setzen und dann auch alle vier AutoTune's einzeln starten! Gleiches wenn man VE-Analyse benutzt.
Es gibt dann auch primary und secondary Last.
Hatte jetzt bisher nur bei Primary (Also letztendlich bei niedriger Last) mit Hybrid gefahren und dann bei hoher Last nur Alpha-N. Also geht schon ein bisschen Richtung ITB.
Man darf sich dann aber auch nicht wundern, wenn beim Übergang der Tables genau an den Schnittpunkten nicht die gleichen Werte stehen. Denn bei dem einen Table fließt ja dann MAP noch mit ein und bei dem anderen eben nicht.
Bin mir noch nicht sicher wie ich das jetzt in Zukunft handhaben werde. Werde mir erstmal anschauen welche Möglichkeiten ich mit MAP-Sampling bei hoher Drehzahl noch habe. Also ob sich das überhaupt lohnt. Weil wenn der Wert da sowieso ziemlich konstant bleiben würde (wie es bei "Event-Average" als MAP-Sampling Methode bei mir immer ist) dann kann ich hier eigentlich wie bisher auf Hybrid verzichten und fahre dann dort nur reines Alpha-N.
Ansonsten hätte man vielleicht sogar noch Probleme mit einem leicht schwankendem MAP-Wert je nachdem wo man abgreift (Einzeln, Zusammengeführt, Dämpfungsvolumen etc).
Den Vorteil vom MAP-Einfluss sehe ich bei unseren Motoren eh nur im unteren Lastbereich für ein besseres Ansprechverhalten beziehungsweise feinere Lastabstufung als rein Alpha-N.
Wenn ich es dann weiter so handhabe, müsste ich dann sowieso Baro-Corr für die RAM-Air Korrektur benutzen.
Aber im Prinzip macht es wohl grundsätzlich für RAM-Air wohl schon mehr Sinn die Baro-Corr zu benutzen.
Bzw. bei dir auf alle Fälle, wenn sich da am MAP-Wert geschwindigkeitsabhängig sowieso nichts mehr ändert bei voll geöffneter Drosselklappe.
Dann hast du ja eh keine andere Möglichkeit.
Außerdem können wir bei unseren Motoren im hohen Lastbereich eh kein reines Speed-Density fahren und könnten daher "höchstens" auf Hybrid bleiben. Hier müsste ja wirklich jeder "Luftdrucküberschuss" allein durch die Berechnung der Injektor Open-Time kompensiert werden. Da bei Hybrid die fuelload ja nur TPS ist. Somit ist bei 100% TPS einfach Ende.
Hier wäre dann unsere einzigste Option bzw. Auswirkung, dass sich die Pulsweite MAP-Zuwachs ändert.
Wobei das aber wegen der fixen Deadtime weniger als ein linearer Zuwachs wäre.
Hier würde dann natürlich die Konfigurationsmöglichkeit fehlen im Gegensatz zur Baro-Corr.
PW = DT + (ReqFuel * MAP * Stoich/AFRtarget * VE[RPM,TPS] * AirDen * BaroCor * corrections)
Ich würde es einfach mal testen und dort einen Sensor installieren und schauen wie das Signal ausschaut. Also ob man es gebrauchen kann und keine Resonanzen/Druckschwankungen auftreten. Falls es Probleme gibt auch mal mit der Montageposition probieren oder ggf spezielles Sensorgehäuse.
Im Endeffekt ist es ja egal wie der höhere Luftdruck zustande kommt. Also wegen einer Höhenänderung oder aufgrund von RAM-Air Effekt. Und eine weitere Möglichkeit hätten wir mit der Standard-Firmware ja sowieso nicht.
Vom Abstimmen her würde ich dann erstmal die Baro-Corr (in Richtung größer Umgebungsdruck) auf 100% stellen und dann so schön sauber wie bei deinem Log bei Vollgas mal alle Gänge bis zum Begrenzer durchsteppen.
Oder ggf auch mal die Gänge von niedriger Drehzahl bis zum Begrenzer bei Vollgas durchdrehen.
Dann müsste man ja gut sehen um wie viel Prozent der Druck steigt und um wie viel Prozent das Gemisch bei entsprechender Stelle abmagert. Dafür dann aber AutoTune und Lambda-Regelkreis deaktivieren.
Dann könnte man sich ja aus der Abweichung die Baro-Corr zurechtlegen.
Danach nochmal das gleiche Spiel und schauen wie gut die letzte Korrektur hinkommt.
Oder auf einem Prüfstand mit Bremse und vernünftiger Anblasung für die RAM-Airs. Einfach mal in einem stationären Betriebspunkt bei hoher Last die Anblasung variieren. Dann kann man ja direkt die Baro-Correction so anpassen, dass das Gemisch für den aktuellen Druck in der Airbox wieder genauso ist wie ohne Anblasung.
Davor vielleicht auf der Straße mal schauen welchen Druck man im realen Betrieb überhaupt zustande bekommt.
Bei Beispielsweise 40mBar Überdruck, könnte man die obere Grenze der Baro-Corr auf 105kPa festlegen und bis dahin auf dem Prüfstand abstimmen (wenn der Prüfstand das schafft). So hätte man dann noch einen Sicherheitsabstand von circa 10 mBar.
Davor das Basiskennfeld auf dem Prüfstand komplett ohne Anblasung erstellt und den dort herrschenden Umgebungsluftdruck in der Baro-Corr als 100% festgelegt.
Rein für den Rennstreckenbetrieb könnte man sich ja den Baro-Sensor eh schenken. (Wenn man jetzt RAM-Air außen vorlässt). Denn hier haben wir ja 'normal' keine so gravierenden Höhenunterschiede auf dem Rundkurs, dass wir hier Probleme bekommen würden. Reicht ja vollkommen aus einfach den MAP-Wert nach Zündung-AN heranzuziehen - "Initial MAP-Reading"
Verstehe aber gerade nicht, was du mit zweiten Baro meinst.
Meinst du einfach Baro anstatt MAP Initial-Reading?
Also ich hatte jetzt dieses Jahr mal über CAN-Bus einen Baro-Sensor dran. Aber auch nur weil der quasi bei einem anderen Sensor mit dabei war. Und über CAN ist das ganze ja kein Stress.
Aber einen Drucksensor für die Airbox hatte ich bisher noch gar nicht dran. Soll aber noch kommen. Einen Eingang an der MS habe ich noch frei dafür. Ansonsten auch über CAN-Bus
Mit dieser MAT/CLT Correction habe ich mich bisher noch gar nicht beschäftigt bzw. noch gar nicht wirklich bemerkt.
In der Theorie klingt es ja einigermaßen verständlich. Aber ich befürchte das wird extrem aufwendig abzustimmen sein.
Ich hatte Anfangs meinen MAT Sensor im Ansaugstutzen installiert. Da kam das vom Verhalten dann auch so hin, wie es im ToolTip beschrieben ist. Also im Leerlauf etwas höhere MAT als Umgebungstemperatur. Aber dann bei höherer Last ist der MAT-Wert gleich ziemlich schnell unter die Umgebungstemperatur gefallen. Teilweise wesentlich niedriger!
War auf alle Fälle so nicht abzustimmen gewesen.
Und für den Warmstart und Heißstart musste man auf alle Fälle das MAT-Signal komplett ignorieren via dem Setting "Ignore MAT-Correction during ASE". Und dann hab ich die AfterStartEnrichment (ASE) noch künstlich etwas länger gemacht als eigentlich nötig um so das Problem mit dem Hitzestau nach dem Warmstart komplett zu umgehen.
Aber wie gesagt, da die bisherige Sensorposition unbrauchbar war, hatte ich die MAT-Correction dann eh sogut wie deaktiviert (nur sehr geringe Correction)
Deshalb möchte ich dann als nächstes mal einen MAT Sensor in der Airbox und einen für Umgebungslufttemperatur testen.
Wo hast du denn deinen MAT-Sensor positioniert?
Generell muss ich sagen, dass man das Motorrad zwar relativ schnell gut zum Laufen bekommt. Aber wenn man dann mal die ganzen Korrekturen etc vernünftig abstimmen möchte, ist man echt ewig beschäftigt. Und wenn man dann mal die Lasterfassung ändert, kann man das gesamte VE-Kennfeld eh wieder vergessen.
Und zuerst auch mal auf einen Kraftstoffdruck festlegen mit oder ohne MAP-Kompensation.
Und wenn man keinen kostengünstigen Prüfstand mit Bremse zur Verfügung hat, ist es nochmal viel schwieriger.
Ich musste bisher alles immer auf der Straße (Also am besten auf einer wenig befahrenen Autobahn) herausfahren. Dieses Jahr hatte ich die Probleme, dass mein Laptop bzw. der Akku langsam den Geist aufgibt. Das macht die Sache dann nahezu unmöglich.
Letzte Woche mal mit einer anderen Maschine auf einem Dyno 250i (mit Bremse) gewesen/gefahren. Sowas wäre halt fürs Basiskennfeld erstmal genial.
Das AutoTune Live funktioniert zwar meiner Meinung nach gut um schnell ein fahrbares Kennfeld hinzubekommen. Aber fürs Feintuning finde ich es unbrauchbar. Kann dir auch nicht sagen wieso. Aber da bist du teilweise gefühlt ewig im selben Betriebspunkt, es ist kein Filter aktiv und der Cell-Change Resistance auf Easy ... aber es tut sich einfach nichts. Habe dann zum Schluss nur noch via Data-Logging und VE-Analyser aus dem MegaLog Viewer gearbeitet.
Das ging dann wesentlich besser und schneller. Und vor allem kann man die ganzen Änderungen anhand des Data-Logs auch viel besser nachvollziehen und ggf manuell noch Änderungen vornehmen.
Ansonsten habe ich dieses Jahr noch so paar Kleinigkeiten ausprobiert.
Da fande ich vor allem die Idle Advance Timing Correction gut. Bzw ich musste erst noch eine kleine Änderung in der Firmware vornehmen, damit die auch bei 0.0% (oder auch kleiner) TPS funktioniert. Da war noch ein Bug in der Firmware.
Aber so bekommt man einen sehr smoothen Leerlauf und kann auch den Kaltstart noch optimieren.
Auch wenn die Drehzahlanhebung bei kaltem Motor durch die Zündung wesentlich schlechter funktioniert als bei warmen Motor.
Und ich habe dieses Jahr auch eine elektrische Wasserpumpe direkt über die Megasquirt per PWM angesteuert.
Das ist echt richtig geil.
Außerdem noch die HD Version vom MegalogViewer geholt.
Diese Histogramm Ansicht finde ich echt gut. Nicht nur für die Gemischabstimmung.
Aber hier erkennt man dann auch relativ schnell ob die Grundabstimmung einfach noch schlecht ist oder ob eine Korrektur nicht passt (hier hat dann ein größerer Bereich des Kennfeldes nahezu die gleiche Abweichung)
(Bild gibts in Vollauflösung beim Draufklicken)
Die Ansicht sollte dann auch für die Abstimmung der Traktionskontrolle ganz gut sein.
Die TC hatte ich jetzt noch nicht aktiv. Lediglich die Geschwindigkeiten Front und Rear mit aufgezeichnet. Die Schrägenabhängigkeit des Schlupfs war gar nicht sooo groß wie erwartet. Aber auf alle Fälle vorhanden.
Also so, dass der Schräglagensensor schon Sinn macht. Auch wenn ich mit dem noch etwas Probleme hatte, die ich noch lösen muss.
Bremsdrucksensor hatte ich jetzt auch schon über CAN-Bus mit angeschlossen und aufgezeichnet.
War auch mal ganz interessant zu sehen. Wenn man im Stand einfach mal mit viel Kraft am Hebel zieht bekommt man bis zu 60bar Druck.
Unterm Fahren hatte ich dagegen nur so bis circa 14 bar.
Deshalb hätte ich eigentlich fast noch einen Sensor mit einem geringeren Druckbereich nehmen können für eine feinere Auflösung. Meiner ging bis über 100bar, wenn ich das richtig im Kopf habe
Ich benutze aktuell alle 4 VE-Tables um so das größtmögliche Kennfeld bzw. die feinste Abstufung zu bekommen.
Und zwar einmal RPM-Switch von VE 1 auf 3
Dann Table Blend von VE2 auf VE 4 via TPS als harten Übergang.
Hier mal ein Bild wie dann das ganze aussieht.
Bitte auf die Werte nichts geben. Das war jetzt nur so ein Uralt-Table von meinem Computer. Das aktuelle Zeug liegt immer auf meinem Laptop.
Macht natürlich so viel mehr Arbeit zum Abstimmen als nur mit einem oder zwei Tables. Aber ich denke es kommt der Fahrbarkeit zu Gute. Da sich der VE-Wert zwischen manchen Stützpunkten eben doch nicht linear verhält.
Man muss nur für AutoTune und dem VE-Analyser immer entsprechende Drehzahl und Last Filter setzen. Denn anscheinend ist der nicht wirklich für alle 4 Tables ausgelegt. Kenne auch bisher niemanden der so wie ich alle 4 Tables quasi gleichzeitig nutzt. Auf alle Fälle pfuscht dann der AutoTune ohne Filter irgendwie im falschen Table rum.
Also muss man im AutoTune für jedes Table den passenden Filter setzen und dann auch alle vier AutoTune's einzeln starten! Gleiches wenn man VE-Analyse benutzt.
Es gibt dann auch primary und secondary Last.
Hatte jetzt bisher nur bei Primary (Also letztendlich bei niedriger Last) mit Hybrid gefahren und dann bei hoher Last nur Alpha-N. Also geht schon ein bisschen Richtung ITB.
Man darf sich dann aber auch nicht wundern, wenn beim Übergang der Tables genau an den Schnittpunkten nicht die gleichen Werte stehen. Denn bei dem einen Table fließt ja dann MAP noch mit ein und bei dem anderen eben nicht.
Bin mir noch nicht sicher wie ich das jetzt in Zukunft handhaben werde. Werde mir erstmal anschauen welche Möglichkeiten ich mit MAP-Sampling bei hoher Drehzahl noch habe. Also ob sich das überhaupt lohnt. Weil wenn der Wert da sowieso ziemlich konstant bleiben würde (wie es bei "Event-Average" als MAP-Sampling Methode bei mir immer ist) dann kann ich hier eigentlich wie bisher auf Hybrid verzichten und fahre dann dort nur reines Alpha-N.
Ansonsten hätte man vielleicht sogar noch Probleme mit einem leicht schwankendem MAP-Wert je nachdem wo man abgreift (Einzeln, Zusammengeführt, Dämpfungsvolumen etc).
Den Vorteil vom MAP-Einfluss sehe ich bei unseren Motoren eh nur im unteren Lastbereich für ein besseres Ansprechverhalten beziehungsweise feinere Lastabstufung als rein Alpha-N.
Wenn ich es dann weiter so handhabe, müsste ich dann sowieso Baro-Corr für die RAM-Air Korrektur benutzen.
Aber im Prinzip macht es wohl grundsätzlich für RAM-Air wohl schon mehr Sinn die Baro-Corr zu benutzen.
Bzw. bei dir auf alle Fälle, wenn sich da am MAP-Wert geschwindigkeitsabhängig sowieso nichts mehr ändert bei voll geöffneter Drosselklappe.
Dann hast du ja eh keine andere Möglichkeit.
Außerdem können wir bei unseren Motoren im hohen Lastbereich eh kein reines Speed-Density fahren und könnten daher "höchstens" auf Hybrid bleiben. Hier müsste ja wirklich jeder "Luftdrucküberschuss" allein durch die Berechnung der Injektor Open-Time kompensiert werden. Da bei Hybrid die fuelload ja nur TPS ist. Somit ist bei 100% TPS einfach Ende.
Hier wäre dann unsere einzigste Option bzw. Auswirkung, dass sich die Pulsweite MAP-Zuwachs ändert.
Wobei das aber wegen der fixen Deadtime weniger als ein linearer Zuwachs wäre.
Hier würde dann natürlich die Konfigurationsmöglichkeit fehlen im Gegensatz zur Baro-Corr.
PW = DT + (ReqFuel * MAP * Stoich/AFRtarget * VE[RPM,TPS] * AirDen * BaroCor * corrections)
Ich würde es einfach mal testen und dort einen Sensor installieren und schauen wie das Signal ausschaut. Also ob man es gebrauchen kann und keine Resonanzen/Druckschwankungen auftreten. Falls es Probleme gibt auch mal mit der Montageposition probieren oder ggf spezielles Sensorgehäuse.
Im Endeffekt ist es ja egal wie der höhere Luftdruck zustande kommt. Also wegen einer Höhenänderung oder aufgrund von RAM-Air Effekt. Und eine weitere Möglichkeit hätten wir mit der Standard-Firmware ja sowieso nicht.
Vom Abstimmen her würde ich dann erstmal die Baro-Corr (in Richtung größer Umgebungsdruck) auf 100% stellen und dann so schön sauber wie bei deinem Log bei Vollgas mal alle Gänge bis zum Begrenzer durchsteppen.
Oder ggf auch mal die Gänge von niedriger Drehzahl bis zum Begrenzer bei Vollgas durchdrehen.
Dann müsste man ja gut sehen um wie viel Prozent der Druck steigt und um wie viel Prozent das Gemisch bei entsprechender Stelle abmagert. Dafür dann aber AutoTune und Lambda-Regelkreis deaktivieren.
Dann könnte man sich ja aus der Abweichung die Baro-Corr zurechtlegen.
Danach nochmal das gleiche Spiel und schauen wie gut die letzte Korrektur hinkommt.
Oder auf einem Prüfstand mit Bremse und vernünftiger Anblasung für die RAM-Airs. Einfach mal in einem stationären Betriebspunkt bei hoher Last die Anblasung variieren. Dann kann man ja direkt die Baro-Correction so anpassen, dass das Gemisch für den aktuellen Druck in der Airbox wieder genauso ist wie ohne Anblasung.
Davor vielleicht auf der Straße mal schauen welchen Druck man im realen Betrieb überhaupt zustande bekommt.
Bei Beispielsweise 40mBar Überdruck, könnte man die obere Grenze der Baro-Corr auf 105kPa festlegen und bis dahin auf dem Prüfstand abstimmen (wenn der Prüfstand das schafft). So hätte man dann noch einen Sicherheitsabstand von circa 10 mBar.
Davor das Basiskennfeld auf dem Prüfstand komplett ohne Anblasung erstellt und den dort herrschenden Umgebungsluftdruck in der Baro-Corr als 100% festgelegt.
Rein für den Rennstreckenbetrieb könnte man sich ja den Baro-Sensor eh schenken. (Wenn man jetzt RAM-Air außen vorlässt). Denn hier haben wir ja 'normal' keine so gravierenden Höhenunterschiede auf dem Rundkurs, dass wir hier Probleme bekommen würden. Reicht ja vollkommen aus einfach den MAP-Wert nach Zündung-AN heranzuziehen - "Initial MAP-Reading"
Verstehe aber gerade nicht, was du mit zweiten Baro meinst.
Meinst du einfach Baro anstatt MAP Initial-Reading?
Also ich hatte jetzt dieses Jahr mal über CAN-Bus einen Baro-Sensor dran. Aber auch nur weil der quasi bei einem anderen Sensor mit dabei war. Und über CAN ist das ganze ja kein Stress.
Aber einen Drucksensor für die Airbox hatte ich bisher noch gar nicht dran. Soll aber noch kommen. Einen Eingang an der MS habe ich noch frei dafür. Ansonsten auch über CAN-Bus
Mit dieser MAT/CLT Correction habe ich mich bisher noch gar nicht beschäftigt bzw. noch gar nicht wirklich bemerkt.
In der Theorie klingt es ja einigermaßen verständlich. Aber ich befürchte das wird extrem aufwendig abzustimmen sein.
Ich hatte Anfangs meinen MAT Sensor im Ansaugstutzen installiert. Da kam das vom Verhalten dann auch so hin, wie es im ToolTip beschrieben ist. Also im Leerlauf etwas höhere MAT als Umgebungstemperatur. Aber dann bei höherer Last ist der MAT-Wert gleich ziemlich schnell unter die Umgebungstemperatur gefallen. Teilweise wesentlich niedriger!
War auf alle Fälle so nicht abzustimmen gewesen.
Und für den Warmstart und Heißstart musste man auf alle Fälle das MAT-Signal komplett ignorieren via dem Setting "Ignore MAT-Correction during ASE". Und dann hab ich die AfterStartEnrichment (ASE) noch künstlich etwas länger gemacht als eigentlich nötig um so das Problem mit dem Hitzestau nach dem Warmstart komplett zu umgehen.
Aber wie gesagt, da die bisherige Sensorposition unbrauchbar war, hatte ich die MAT-Correction dann eh sogut wie deaktiviert (nur sehr geringe Correction)
Deshalb möchte ich dann als nächstes mal einen MAT Sensor in der Airbox und einen für Umgebungslufttemperatur testen.
Wo hast du denn deinen MAT-Sensor positioniert?
Generell muss ich sagen, dass man das Motorrad zwar relativ schnell gut zum Laufen bekommt. Aber wenn man dann mal die ganzen Korrekturen etc vernünftig abstimmen möchte, ist man echt ewig beschäftigt. Und wenn man dann mal die Lasterfassung ändert, kann man das gesamte VE-Kennfeld eh wieder vergessen.
Und zuerst auch mal auf einen Kraftstoffdruck festlegen mit oder ohne MAP-Kompensation.
Und wenn man keinen kostengünstigen Prüfstand mit Bremse zur Verfügung hat, ist es nochmal viel schwieriger.
Ich musste bisher alles immer auf der Straße (Also am besten auf einer wenig befahrenen Autobahn) herausfahren. Dieses Jahr hatte ich die Probleme, dass mein Laptop bzw. der Akku langsam den Geist aufgibt. Das macht die Sache dann nahezu unmöglich.
Letzte Woche mal mit einer anderen Maschine auf einem Dyno 250i (mit Bremse) gewesen/gefahren. Sowas wäre halt fürs Basiskennfeld erstmal genial.
Das AutoTune Live funktioniert zwar meiner Meinung nach gut um schnell ein fahrbares Kennfeld hinzubekommen. Aber fürs Feintuning finde ich es unbrauchbar. Kann dir auch nicht sagen wieso. Aber da bist du teilweise gefühlt ewig im selben Betriebspunkt, es ist kein Filter aktiv und der Cell-Change Resistance auf Easy ... aber es tut sich einfach nichts. Habe dann zum Schluss nur noch via Data-Logging und VE-Analyser aus dem MegaLog Viewer gearbeitet.
Das ging dann wesentlich besser und schneller. Und vor allem kann man die ganzen Änderungen anhand des Data-Logs auch viel besser nachvollziehen und ggf manuell noch Änderungen vornehmen.
Ansonsten habe ich dieses Jahr noch so paar Kleinigkeiten ausprobiert.
Da fande ich vor allem die Idle Advance Timing Correction gut. Bzw ich musste erst noch eine kleine Änderung in der Firmware vornehmen, damit die auch bei 0.0% (oder auch kleiner) TPS funktioniert. Da war noch ein Bug in der Firmware.
Aber so bekommt man einen sehr smoothen Leerlauf und kann auch den Kaltstart noch optimieren.
Auch wenn die Drehzahlanhebung bei kaltem Motor durch die Zündung wesentlich schlechter funktioniert als bei warmen Motor.
Und ich habe dieses Jahr auch eine elektrische Wasserpumpe direkt über die Megasquirt per PWM angesteuert.
Das ist echt richtig geil.
Außerdem noch die HD Version vom MegalogViewer geholt.
Diese Histogramm Ansicht finde ich echt gut. Nicht nur für die Gemischabstimmung.
Aber hier erkennt man dann auch relativ schnell ob die Grundabstimmung einfach noch schlecht ist oder ob eine Korrektur nicht passt (hier hat dann ein größerer Bereich des Kennfeldes nahezu die gleiche Abweichung)
Die Ansicht sollte dann auch für die Abstimmung der Traktionskontrolle ganz gut sein.
Die TC hatte ich jetzt noch nicht aktiv. Lediglich die Geschwindigkeiten Front und Rear mit aufgezeichnet. Die Schrägenabhängigkeit des Schlupfs war gar nicht sooo groß wie erwartet. Aber auf alle Fälle vorhanden.
Also so, dass der Schräglagensensor schon Sinn macht. Auch wenn ich mit dem noch etwas Probleme hatte, die ich noch lösen muss.
Bremsdrucksensor hatte ich jetzt auch schon über CAN-Bus mit angeschlossen und aufgezeichnet.
War auch mal ganz interessant zu sehen. Wenn man im Stand einfach mal mit viel Kraft am Hebel zieht bekommt man bis zu 60bar Druck.
Unterm Fahren hatte ich dagegen nur so bis circa 14 bar.
Deshalb hätte ich eigentlich fast noch einen Sensor mit einem geringeren Druckbereich nehmen können für eine feinere Auflösung. Meiner ging bis über 100bar, wenn ich das richtig im Kopf habe
-
- IchMagKekse Offline
- Beiträge: 17
- Registriert: Mittwoch 24. Juni 2015, 21:13
Re: SRAD 750 Projekt
Kontaktdaten:
Der Riesenvorteil mit ITB ist, dass du für SD und AN einen gemeinsamen VETable hast. Damit kommt VEA sehr gut klar. VEAL benutze ich nicht, da ich TS auch nicht gekauft hab - ich schau da auch gerne noch mal selbst vorher drüber, und da ist ein einfacher Table natürlich auch zum Interpretieren einfacher. Du hast nur vorm Erstellen des VE eine zusätzliche Kurve, um die Abhängigkeit von TPS und MAP festzulegen. Die lässt sich einfach aus ein paar Logs generieren, wenn die Karre halbwegs läuft. Nachteil ist aber auch, dass bei Änderungen dieser Kurve dein VE etwas verrutscht, aber das muss auch nur einmal am Anfang gemacht werden. In Verbindung mit BaroCorr sollte das theoretisch aber auch das robusteste Verfahren sein gegen Druckdifferenzen (laut Hauptentwickler der MS-Extra Fw).Chef_Koch hat geschrieben:Also ITB habe ich noch nicht getestet. Dafür hatte ich einfach noch keine Zeit. Generell hatte ich bisher leider viel zu wenig Zeit zum Abstimmen.
Ja, mir tut der Begriff nur immer etwas weh, da der Map-Sensor ja schon ein Barometer ist. Also Map is das Barometer im Ansaugtrakt, Baro ist das Barometer in der Airbox.Chef_Koch hat geschrieben:Verstehe aber gerade nicht, was du mit zweiten Baro meinst.
Meinst du einfach Baro anstatt MAP Initial-Reading?
Bei dir kann der Wert unter Umgebungstemperatur schon realistisch sein, da beim Zerstäuben das Benzin die Luft herunterkühlt. War auch meine Wunschposition, bis ich die MAT/CLT-Tabelle gefunden habe.Chef_Koch hat geschrieben:Mit dieser MAT/CLT Correction habe ich mich bisher noch gar nicht beschäftigt bzw. noch gar nicht wirklich bemerkt.
In der Theorie klingt es ja einigermaßen verständlich. Aber ich befürchte das wird extrem aufwendig abzustimmen sein.
Ich hatte Anfangs meinen MAT Sensor im Ansaugstutzen installiert. Da kam das vom Verhalten dann auch so hin, wie es im ToolTip beschrieben ist. Also im Leerlauf etwas höhere MAT als Umgebungstemperatur. Aber dann bei höherer Last ist der MAT-Wert gleich ziemlich schnell unter die Umgebungstemperatur gefallen. Teilweise wesentlich niedriger!
War auf alle Fälle so nicht abzustimmen gewesen.
Und für den Warmstart und Heißstart musste man auf alle Fälle das MAT-Signal komplett ignorieren via dem Setting "Ignore MAT-Correction during ASE". Und dann hab ich die AfterStartEnrichment (ASE) noch künstlich etwas länger gemacht als eigentlich nötig um so das Problem mit dem Hitzestau nach dem Warmstart komplett zu umgehen.
Aber wie gesagt, da die bisherige Sensorposition unbrauchbar war, hatte ich die MAT-Correction dann eh sogut wie deaktiviert (nur sehr geringe Correction)
Deshalb möchte ich dann als nächstes mal einen MAT Sensor in der Airbox und einen für Umgebungslufttemperatur testen.
Wo hast du denn deinen MAT-Sensor positioniert?
Mein MAT-Sensor (Plastik) sitzt oben in der Airbox, weg von der Motorhitze aber dennoch im Luftstrom. Warmstartprobleme hab ich damit keine, auch ohne IgnoreMatCorr. Bei niedrigem Luftdurchsatz und warmem Motor ca. 3-4°C wärmer als Umgebungstemperatur, bei hohem Durchsatz quasi identisch mit der Umgebungstemperatur. Airbox ist mit Hitzeschutz versehen, CLT und MAT korrelieren daher im Stand nur sehr schwach, bei hohen Geschwindigkeiten deutlich stärker. Aber der Einfluss von CLT bzw. der Ansaugtemperatur ist im unteren Lastbereich natürlich höher, da das Gemisch länger im warmen Ansaugtrakt ist und der Ansaugtrakt auch weniger gekühlt wird. Vorteil mit Sensor in Airbox ist dass die Erwärmung in der Airbox erfasst wird, und über die MAT/CLT-Tabelle kann man die Lastabhängigkeit im Ansaugstutzen dennoch reinrechnen (je nach Last wird variabler Prozentsatz von CLT reingerechnet).
-
- Chef_Koch Offline
- Beiträge: 676
- Registriert: Montag 14. November 2011, 22:35
- Motorrad: SRAD 750, was sonst?
- Lieblingsstrecke: Schleiz
- Wohnort: Stuttgart
Re: SRAD 750 Projekt
Kontaktdaten:
okay bei ITB müsste ich mich noch etwas einlesen.
Aber wenn ich das richtig verstanden habe, fährst du dann quasi im niedrigen Lastbereich ausschließlich auf SD?
Wie nimmst du denn bei dir dein MAP-Signal ab? Ich nehme an, von allen Zylindern zusammengefasst oder?
Und machst mit MAP-Sampling oder ohne?
Weil ich habe bei mir MAP nur vom ersten Zylinder. Das Signal benutze ich dann auch für die Phasenerkennung (Anstatt Nockenwellensensor). Deshalb kann ich das jetzt auch nicht mehr mit anderen Zylindern zusammenschließen, sonst würde das nicht funktionieren.
Mit Event-Average für den MAP-Wert war das Signal immer ziemlich unruhig beim Fahren. Bzw es waren große Schwankungen drinnen, die ich dann wieder nur übers Filtern rausbekommen hätte. Aber dann wäre ja alles wieder ein Stück verzögert gewesen und das Ansprechverhalten dahin.
Deshalb bin ich dann auf MAP-Sampling gegangen bzw. die Erfassung des kleinsten MAP-Wertes innerhalb eines vorgegebenen Kurbelwinkelbereichs. Den Bereich habe ich dann so gelegt, dass immer der kleinste MAP-Wert erfasst wird. Also Ansaugtakt und Ventile schon etwas weiter geöffnet, aber noch vor max. Ventilhub.
Damit hatte ich dann schon ein wesentlich ruhigeres Signal.
Aber ich glaube vor komplett SD bei niedriger Last hätte ich noch Angst. Beziehungsweise da würde ich wohl keinen perfekten Motorlauf bei mir hinbekommen, wegen dem unruhigen MAP-Signal.
Nockenwellen etc spielen da natürlich auch wieder mit rein.
Vielleicht kannst du mir ja auch per PN einen Link zu einem Data-Log von dir schicken. Das würde mich mal interessieren. Von einem Motorrad und dann auch noch einem Supersportler findet man sowas ja fast nie.
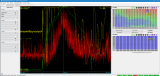
Ich habe mal ein Bild mit dem MAT Verlauf über circa drei Minuten in den Anhang.
Da siehst du wie extrem der MAT-Wert schwankt. Bei hoher Last geht der immer gleich in den Keller.
Das heißt dann anhand von Werten, dass ich beispielsweise 22°C Außentemperatur habe.
Während der Fahrt bei niedriger Last bewege ich mich knapp unterhalb der Umgebungstemperatur.
Aber bei hoher Last gibt er mir dann auch mal nur noch 3°C aus im Extremfall.
10 Minuten nach Motorabstellen habe ich dann 65°C Temperatur.
Kennlinie etc passt natürlich alles zu 100%. Also was er dort im Log anzeigt, das ist auch die Sensortemperatur.
Die Werte sind dann natürlich viel zu extrem für eine Korrektur. Deshalb habe ich die mehr oder weniger "provisorisch" rausgenommen.
Viele Leute meinten Anfangs immer zu mir, dass ich bei der Position ja nur die Stutzentemperatur messen würde. Ich denke diese Theorie hätte ich mit den Werten schon mehr als entkräftet
Sieht man ja auch schon daran, wie schnell der MAT-Wert reagiert.
Aber gut zu sehen, dass bei dir der MAT-Sensor in der Airbox so gut funktioniert.
Werde den dann bei mir auch noch dort positionieren. Und zum Vergleich noch über CAN-Bus den gleichen Sensor für die Umgebungstemperatur.
Hast du dann bei dir noch die Standard MAT Air Density Table drinnen? Oder musstest du die etwas anpassen?
Und hast du ein offenes Sensorelement?
Aber wenn ich das richtig verstanden habe, fährst du dann quasi im niedrigen Lastbereich ausschließlich auf SD?
Wie nimmst du denn bei dir dein MAP-Signal ab? Ich nehme an, von allen Zylindern zusammengefasst oder?
Und machst mit MAP-Sampling oder ohne?
Weil ich habe bei mir MAP nur vom ersten Zylinder. Das Signal benutze ich dann auch für die Phasenerkennung (Anstatt Nockenwellensensor). Deshalb kann ich das jetzt auch nicht mehr mit anderen Zylindern zusammenschließen, sonst würde das nicht funktionieren.
Mit Event-Average für den MAP-Wert war das Signal immer ziemlich unruhig beim Fahren. Bzw es waren große Schwankungen drinnen, die ich dann wieder nur übers Filtern rausbekommen hätte. Aber dann wäre ja alles wieder ein Stück verzögert gewesen und das Ansprechverhalten dahin.
Deshalb bin ich dann auf MAP-Sampling gegangen bzw. die Erfassung des kleinsten MAP-Wertes innerhalb eines vorgegebenen Kurbelwinkelbereichs. Den Bereich habe ich dann so gelegt, dass immer der kleinste MAP-Wert erfasst wird. Also Ansaugtakt und Ventile schon etwas weiter geöffnet, aber noch vor max. Ventilhub.
Damit hatte ich dann schon ein wesentlich ruhigeres Signal.
Aber ich glaube vor komplett SD bei niedriger Last hätte ich noch Angst. Beziehungsweise da würde ich wohl keinen perfekten Motorlauf bei mir hinbekommen, wegen dem unruhigen MAP-Signal.
Nockenwellen etc spielen da natürlich auch wieder mit rein.
Vielleicht kannst du mir ja auch per PN einen Link zu einem Data-Log von dir schicken. Das würde mich mal interessieren. Von einem Motorrad und dann auch noch einem Supersportler findet man sowas ja fast nie.
Ja genau, also zuerst dachte ich auch im Stutzen müsste es am besten sein, da man so nah dran ist.IchMagKekse hat geschrieben:Bei dir kann der Wert unter Umgebungstemperatur schon realistisch sein, da beim Zerstäuben das Benzin die Luft herunterkühlt. War auch meine Wunschposition, bis ich die MAT/CLT-Tabelle gefunden habe.
Mein MAT-Sensor (Plastik) sitzt oben in der Airbox, weg von der Motorhitze aber dennoch im Luftstrom. Warmstartprobleme hab ich damit keine, auch ohne IgnoreMatCorr. Bei niedrigem Luftdurchsatz und warmem Motor ca. 3-4°C wärmer als Umgebungstemperatur, bei hohem Durchsatz quasi identisch mit der Umgebungstemperatur. Airbox ist mit Hitzeschutz versehen, CLT und MAT korrelieren daher im Stand nur sehr schwach, bei hohen Geschwindigkeiten deutlich stärker. Aber der Einfluss von CLT bzw. der Ansaugtemperatur ist im unteren Lastbereich natürlich höher, da das Gemisch länger im warmen Ansaugtrakt ist und der Ansaugtrakt auch weniger gekühlt wird. Vorteil mit Sensor in Airbox ist dass die Erwärmung in der Airbox erfasst wird, und über die MAT/CLT-Tabelle kann man die Lastabhängigkeit im Ansaugstutzen dennoch reinrechnen (je nach Last wird variabler Prozentsatz von CLT reingerechnet).
Ich habe mal ein Bild mit dem MAT Verlauf über circa drei Minuten in den Anhang.
Da siehst du wie extrem der MAT-Wert schwankt. Bei hoher Last geht der immer gleich in den Keller.
Das heißt dann anhand von Werten, dass ich beispielsweise 22°C Außentemperatur habe.
Während der Fahrt bei niedriger Last bewege ich mich knapp unterhalb der Umgebungstemperatur.
Aber bei hoher Last gibt er mir dann auch mal nur noch 3°C aus im Extremfall.
10 Minuten nach Motorabstellen habe ich dann 65°C Temperatur.
Kennlinie etc passt natürlich alles zu 100%. Also was er dort im Log anzeigt, das ist auch die Sensortemperatur.
Die Werte sind dann natürlich viel zu extrem für eine Korrektur. Deshalb habe ich die mehr oder weniger "provisorisch" rausgenommen.
Viele Leute meinten Anfangs immer zu mir, dass ich bei der Position ja nur die Stutzentemperatur messen würde. Ich denke diese Theorie hätte ich mit den Werten schon mehr als entkräftet
Sieht man ja auch schon daran, wie schnell der MAT-Wert reagiert.
Aber gut zu sehen, dass bei dir der MAT-Sensor in der Airbox so gut funktioniert.
Werde den dann bei mir auch noch dort positionieren. Und zum Vergleich noch über CAN-Bus den gleichen Sensor für die Umgebungstemperatur.
Hast du dann bei dir noch die Standard MAT Air Density Table drinnen? Oder musstest du die etwas anpassen?
Und hast du ein offenes Sensorelement?
- Dateianhänge
-
-
- IchMagKekse Offline
- Beiträge: 17
- Registriert: Mittwoch 24. Juni 2015, 21:13
Re: SRAD 750 Projekt
Kontaktdaten:
Alle vier zusammengeführt, Event average. Die Unterdruckleitung zur MS ist ca. 1,6m, und an der selben Leitung hängt auch noch der Druckregler. Ist ein ordentlich glattes Signal, und hängt dem Tps nicht signifikant hinterher oder ähnliches. Ja, der untere Lastbereich ist komplett SD.Chef_Koch hat geschrieben:okay bei ITB müsste ich mich noch etwas einlesen.
Aber wenn ich das richtig verstanden habe, fährst du dann quasi im niedrigen Lastbereich ausschließlich auf SD?
Wie nimmst du denn bei dir dein MAP-Signal ab? Ich nehme an, von allen Zylindern zusammengefasst oder?
Und machst mit MAP-Sampling oder ohne?
Das sollte aber bei dir auch trotz dem anderen Map-Sensor funktionieren, wenn du den an nem anderen Schlauch hast. Bei meiner Einspritzbrücke gehen pro Gehäuse 2 Unterdruckanschlüsse ab. Es ist da kein Problem nochmal das Signal eines einzelnen Zylinders abzugreifen, trotz Zusammenführung. Der Druck der Ansaugkanäle ist praktisch unabhängig voneinander, da die Verbindungen ja extrem gedrosselt sind.
Kommt per Pn. Ist der erste Log inkl. dem Baro in der Airbox mit der zugehörigen Msq. Leider ist das Signal stark unterdämpft, werde noch eine Drossel am Sensor anbringen.Chef_Koch hat geschrieben:Vielleicht kannst du mir ja auch per PN einen Link zu einem Data-Log von dir schicken. Das würde mich mal interessieren. Von einem Motorrad und dann auch noch einem Supersportler findet man sowas ja fast nie.
Auch teste ich grade mit vielen Einstellungen rum, und der VE ist daher aktuell quasi ständig daneben. Ist aber witzigerweise trotz deaktivierter Lambdaregelung gut fahrbar. SD besser als AN. Habe auf Basis des Logs heute abend massiv umgebaut und teste morgen stark andere ITB Einstellungen, da die standard LoadSwitch-Kurve eher für Motoren mit mehr Hubraum zu passen scheint.
Ja, Standardtabelle. Hab nur die CLT/MAT Tabelle etwas gefüllt mit aus einem groben Modell abgeleiteten Daten. Das scheint recht gut zu passen, aber bei mir ändert sich aktuell einfach noch viel zu viel, als das ich da ne verlässliche Aussage zu machen könnte.Chef_Koch hat geschrieben:Hast du dann bei dir noch die Standard MAT Air Density Table drinnen? Oder musstest du die etwas anpassen?
Und hast du ein offenes Sensorelement?
Ne, is ein geschlossener Plastiksensor von ich glaube einer Zx6r.
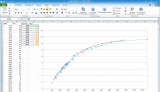
Edit: Hier ein erster Graph vom Ramair aus dem Log, Spitzengeschwindigkeit knapp 245km/h. Signal ist noch zu wenig gedämpft, aber erfreulicherweise kann man deutlich ablesen dass die Drosselklappenabhängigkeit auf den Staudruck nicht so stark ist. Korrektur sollte damit etwas einfacher gehen.
Zuletzt geändert von IchMagKekse am Sonntag 10. Juli 2016, 12:06, insgesamt 2-mal geändert.
-

- Zed Offline
- Beiträge: 1345
- Registriert: Donnerstag 8. April 2010, 15:23
- Motorrad: GSXR 750 Y (WVBD)
- Lieblingsstrecke: Die mit viel Grip
- Wohnort: München
Re: SRAD 750 Projekt
Kontaktdaten:
Ich hab den leisen Verdacht, daß Du arbeitslos bist. WAHNSINN! Ich hab nichtmal Zeit meine Bude einzurichten, geschweige denn am Motorrad zu werkeln. Sensationelle Arbeit. Weiter so!
Grüße, Zed
---------------------------------------------------------
Ich hasse es, wenn die Stimmen in meinem Kopf verstummen und ich nicht weiß, was die Penner planen…
---------------------------------------------------------
Ich hasse es, wenn die Stimmen in meinem Kopf verstummen und ich nicht weiß, was die Penner planen…
-

- tommi Offline
- Beiträge: 2968
- Registriert: Montag 19. September 2005, 13:06
- Motorrad: S1000r
- Lieblingsstrecke: Schleizer Dreieck
- Wohnort: 76316 Malsch
Re: SRAD 750 Projekt
Kontaktdaten:
... wenn ihr beide keinen rostigen Nagel im Kopf habt, wer dann??????
Geil, weiter so. Und wenn man bedenkt, das wir alle nir beim rechts drehen möglichst schnell nach vorne kommen wollen erst recht beachtlich was da alles dahinter stehen kann wenn man sich der Sache richtig annimmt......
Geil, weiter so. Und wenn man bedenkt, das wir alle nir beim rechts drehen möglichst schnell nach vorne kommen wollen erst recht beachtlich was da alles dahinter stehen kann wenn man sich der Sache richtig annimmt......
Agenda 2023:
Pitbiken mit Ride2slide - Hockenheim und Wittgenborn
Chambley mit Hardtwald Racing / 4T
Cheneviers mit Hardtwald Racing / 3T
Pitbike outdoor
Pitbiken mit Ride2slide - Hockenheim und Wittgenborn
Chambley mit Hardtwald Racing / 4T
Cheneviers mit Hardtwald Racing / 3T
Pitbike outdoor
-
- Chef_Koch Offline
- Beiträge: 676
- Registriert: Montag 14. November 2011, 22:35
- Motorrad: SRAD 750, was sonst?
- Lieblingsstrecke: Schleiz
- Wohnort: Stuttgart
Re: SRAD 750 Projekt
Kontaktdaten:
IchMagKekse hat geschrieben:
Edit: Hier ein erster Graph vom Ramair aus dem Log, Spitzengeschwindigkeit knapp 245km/h. Signal ist noch zu wenig gedämpft, aber erfreulicherweise kann man deutlich ablesen dass die Drosselklappenabhängigkeit auf den Staudruck nicht so stark ist. Korrektur sollte damit etwas einfacher gehen.
Ich habe mal dein Barometer Signal geglättet (SmoothBasis Funktion, weiß nicht ob das auch in der kostenlosen Version geht)
Wenn man das Signal durch eine Drossel o.ä. vor dem Sensor auch noch sogut hinbekommt, könnte die MS auf alle Fälle schon mal gut damit arbeiten.
Hier mal im Detail der Bereich, in dem du nach dem Anfahren bis in den 6. Gang schaltest und bis 10.500 rpm hochdrehst.
Da sieht man ja sehr schön wie der Baro-Wert ansteigt. Rein geschwindigkeitsabhängig könnte man das sicher noch schöner darstellen.
Im Gegensatz zum Leerlauf vor dem losfahren steigt der Baro um 20.02 mBar an.
Hier auch nochmal der gesamte Log. Sieht ganz plausibel aus der Verlauf von deinem Baro.
Würde dann im Maximum so circa 20-22 mBar Überdruck durch Ram-Air entsprechen.
Muss man dann aber nochmal anschauen wenn das Signal an sich (quasi hardwaremäßig) noch etwas gedämpft wird und vll die Geschwindigkeit noch etwas höher ist, falls da realistisch noch Luft ist?
Normal sollte mit einem guten Ram-Air so 30-60 mBar möglich sein.
Natürlich dann bei Maximalgeschwindigkeit. Der Staudruck nimmt ja auch quadratisch mit der Geschwindigkeit zu.
Geht auch gleich nochmal ne PN raus. Mir sind noch ein paar Sachen in deinem Log aufgefallen.
Habe dir auch mal einen hochgeladen. Am besten wir telefonieren mal
Danke! Aber leider in letzter Zeit wieder gar nicht zum Schrauben gekommen. Habe das Motorrad jetzt schon wieder seit 2 Monaten nicht mal mehr gesehen und wird auch noch etwas dauern, bis ich wieder weitermachen kann.Zed hat geschrieben:Ich hab den leisen Verdacht, daß Du arbeitslos bist. WAHNSINN! Ich hab nichtmal Zeit meine Bude einzurichten, geschweige denn am Motorrad zu werkeln. Sensationelle Arbeit. Weiter so!
Dann folgt hauptsächlich noch etwas Detail-Arbeit und paar Motoren noch fertig machen, dann vor allem mal vernünftig Abstimmen und Prüfstand etc.
tommi hat geschrieben:... wenn ihr beide keinen rostigen Nagel im Kopf habt, wer dann??????
Geil, weiter so. Und wenn man bedenkt, das wir alle nir beim rechts drehen möglichst schnell nach vorne kommen wollen erst recht beachtlich was da alles dahinter stehen kann wenn man sich der Sache richtig annimmt......
Ja in eine vernünftige Abstimmung mit einer vollprogrammierbaren Motorsteuerung, bei der man quasi bei null anfängt, kann man echt unendlich viel Zeit stecken. Das gute ist aber immer, dass man es relativ schnell vernünftig zum Laufen bekommt. Richtig aufwendig ist dann immer nur der Feinschliff.
In unserem Fall ist es natürlich noch etwas aufwendiger, wenn eine Vergaser-Maschine auf Einspritzer umgerüstet wird.
Mit einer Einspritzer als Basis hat man wenigstens schon mal alle Sensoren an einer (üblicherweise) geeigneten Position.
Wenn es dann mal endlich das Budget erlaubt, will ich auch noch unbedingt eine Flachschieber Einspritzanlage mit 2 Einspritzleisten umsetzen. Vielleicht dann sogar gleich mit Drive-By-Wire. Das geht jetzt auch rudimentär mit der Megasquirt. Da freue ich mich schon richtig drauf
Letzte Woche hatte ich auch mal die SRAD Werks-Einspritzung in der Hand (mit Shower-Einspritzung). Sowas motiviert dann immer gleich wieder ungemein